top of page
DESIGN RESEARCH
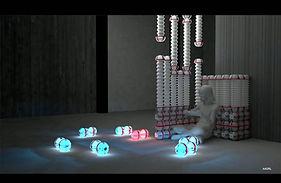
SLINKY(BOT)
M.Arch
AADRL, Spyropolous Design Lab
SlinkyBot is a kinetic, soft-robotic system that explores movement, flexibility, and adaptive form through a continuous, slinky-like geometry. Designed as part of Joumana’s master’s research, it investigates how material behavior and programmed motion can generate responsive spatial structures, blurring the boundary between robotics, architecture, and living systems.
Team: Joumana Abdelkhalek, Aya Riad, Xia Xin, Hanbing Zhao
BIO2||DXB -The Pavilion
SHIFT+DESIGN SPACE & RESEARCH
BiO2 || DXB is an immersive, algae-powered pavilion that transforms microalgae into architecture. It demonstrates how living systems can fuel regenerative, energy-efficient futures for the UAE. Designed as a modular bioreactor that evolves over time, it merges Emirati cultural motifs with biotechnology to showcase microalgae’s extraordinary potential to clean, power, and reshape the built environment.

PLUSH
SHIFT+DESIGN SPACE & RESEARCH
P.LUSH is an interactive pavilion in Dubai Design District that merges generative design with recycled HDPE to create a refined, culturally rooted space inspired by the Majlis. Its three geodesic domes, responsive ventilation system, and Emirati-inspired color palette demonstrate how recycled plastic can shape adaptive, sustainable, and beautiful architecture.
COMPUTING MATTER
M.Arch
AADRL
The Y column explores how plaster and fabric stitching interact by using physical prototypes to study geometry and material behavior, ultimately redefining edges to strengthen structurally weak folds. Using physics simulation tools the team developed a modular prototype that directs plaster through stitched patterns, predicting water flow and correlating digital simulations with material performance.
ENCODED MATTER
M.Arch
AADRL
The workshop explored how swarm simulations created in Processing could be translated into physical form through CNC milling, using ArtCAM to convert digital data into machine-readable coordinates. Through iterative experiments with real-time agent-driven milling and an Arduino sensor feedback loop, the team developed a responsive relationship between digital behavior and physical fabrication.

bottom of page